- 免费定制方案
- 免费提供咨询服务
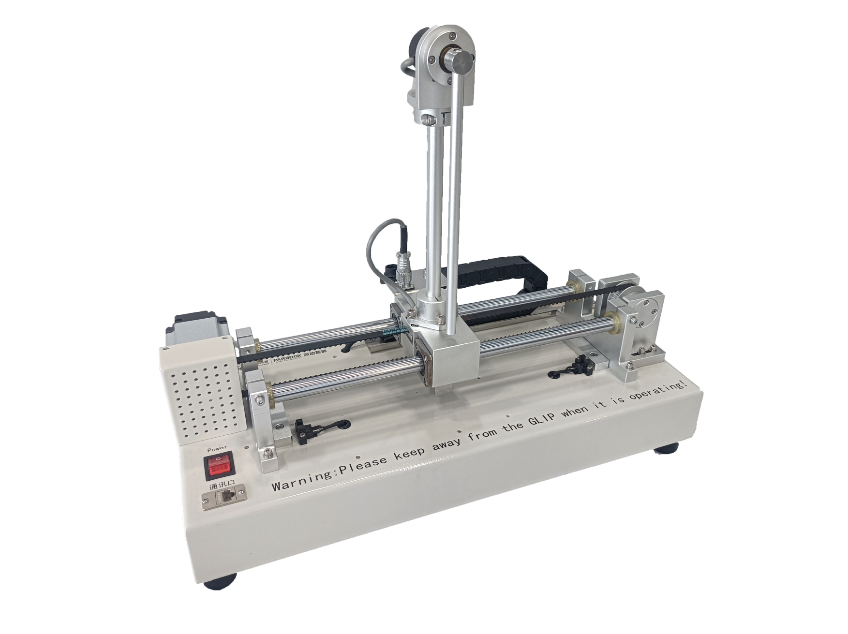
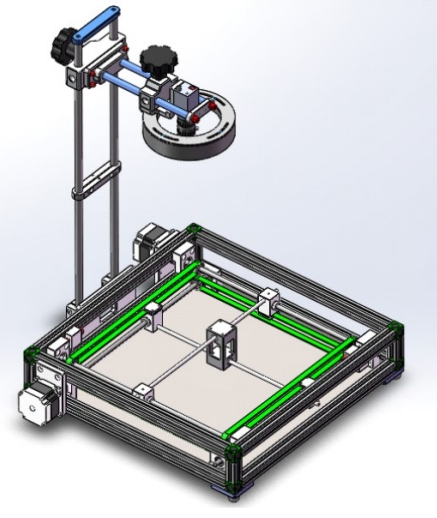
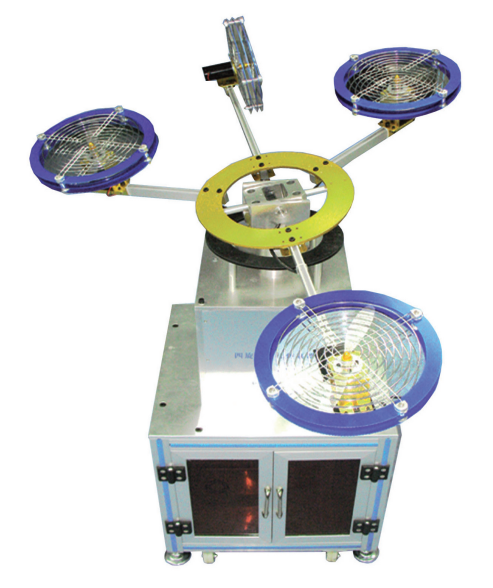
四旋翼飞行仿真器
四旋翼飞行仿真器是四输入三输出的系统。四输入分别为前、后、左、右四个电机的电压;三输出分别为俯仰角、滚动角、偏航角。所以可以选用现代控制理论的状态反馈或者LQR线性二次型最优控制理论设计调节器,通过实验不仅可以学习状态反馈和LQR控制的设计应用 方法,而且可以比较不同状态时系统性能指标的变化,来比较状态反馈和LQR控制之间区别联系。
四旋翼飞行仿真器本体由安装在万向节轴杆上的四个带螺旋桨的电机提供动力。其中,前、左和右三个电机实现本体的俯仰姿态,左右两个电机实现飞本体的滚动姿态,后电机实现本体的偏航姿态。通过安装在平台上的三个编码器检测飞本体的三种姿态,反馈入控制器计算出控制量,控制电机转动,以此来实现本体的俯仰、偏航和滚动三种姿态的精确定位。
实验内容:
1、动力学分析;
2、建立状态方程;
3、线性二次型最优调节器;
4、 LQR调节器的阶跃仿真;
5、四旋翼LQR六状态阶跃响应测试;
6、四旋翼LQR九状态阶跃响应测试;
7、系统性误差分析。
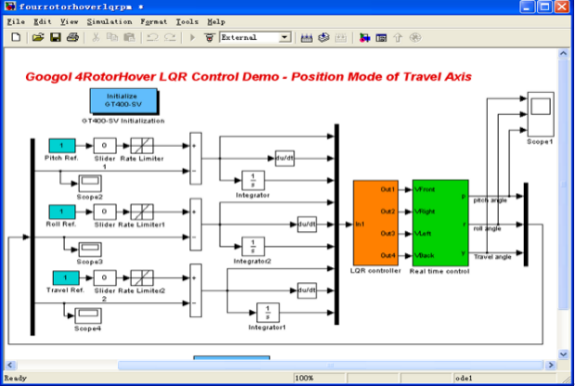
Matlab Simulink控制界面
软件:
MATLAB,支持Win7 32位/64位,WIN10 64位等操作系统
产品列表:
名称 | 型号 | 描述 |
四旋翼飞行仿真器 | GHP3001-Ⅱ | 运动控制卡+直流电机 |
相关推荐