
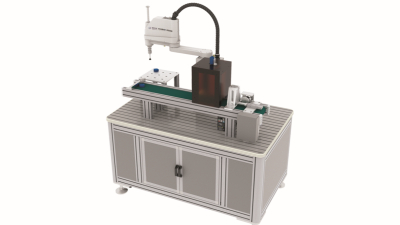
四自由度Scara机器人视觉跟踪系统
Scara机器人有3个旋转关节和1个移动关节。其旋转关节轴线相互平行,可以在平面内进行定位和定向;移动关节用于完成末端件在垂直于平面的运动。手腕参考点的位置是由两旋转关节的角位移φ1和φ2,及移动关节的位移z决定的,即p=f(φ1,φ2,z)。这类机器人的结构轻便、响应快,适用于平面定位,垂直方向进行装配的作业。
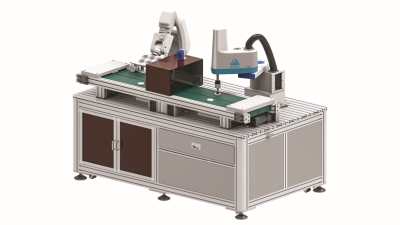
六自由度机器人视觉跟踪系统
伴随计算机、智能相机等技术的不断发展,机器视觉技术愈发成熟,给机器人加上视觉,就如同让机器人有了眼睛,可以大大提高机器人的工作精度和准确性。在该工作站中,首先,智能相机将拍摄得到的信息传递给Scara机器人,让Scara机器人准确知道工件的位置,提高了抓取精度。然后Scara机器人将抓取到的工件放置在小六轴机器人末端带有传感器的托盘中,一旦托盘中摆满工件,Scara机器人便会停止抓取工作。同时,小六轴机器人会将托盘中的工件重新倾倒到传送带上,形成一个循环的工作流程。
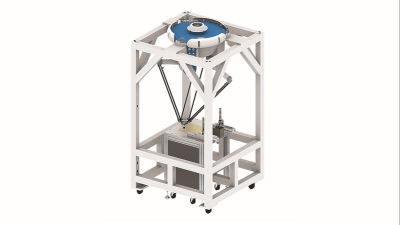
四自由度Delta机器人视觉跟踪系统
Delta机器人属于高速、轻载的并联机器人,由三个并联的伺服轴确定抓取中心(TCP)空间位置,实现对目标的运输、加工等操作。Delta机器人主要用于食品、药品和电子产品等加工、装配。


四自由度SCARA机器人
SCARA机器人有3个旋转关节和1个移动关节。其旋转关节轴线相互平行,可以在平面内进行定位和定向;移动关节用于完成末端件在垂直于平面的运动。手腕参考点的位置是由两旋转关节的角位移φ1和φ2,及移动关节的位移z决定的,即p=f(φ1,φ2,z)。这类机器人的结构轻便、响应快,适用于平面定位,然后在垂直方向进行装配作业。固高派动将SCARA机器人与快换抓手集成为一个工作站,学生除了可以完成基础的机器人操作,还可以掌握工业现场先进的自动化组件控制。

