- 免费定制方案
- 免费提供咨询服务
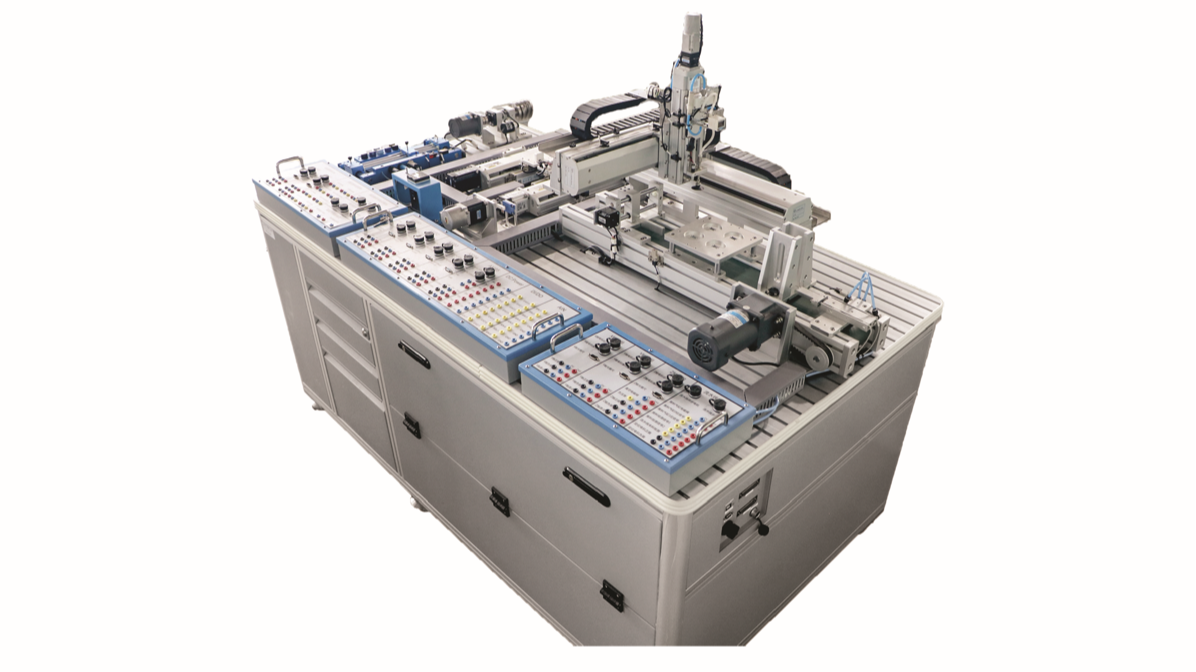
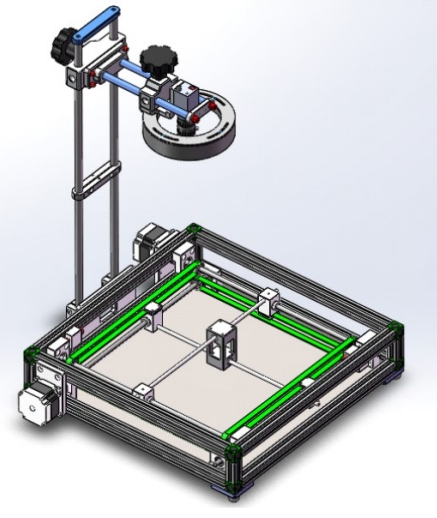
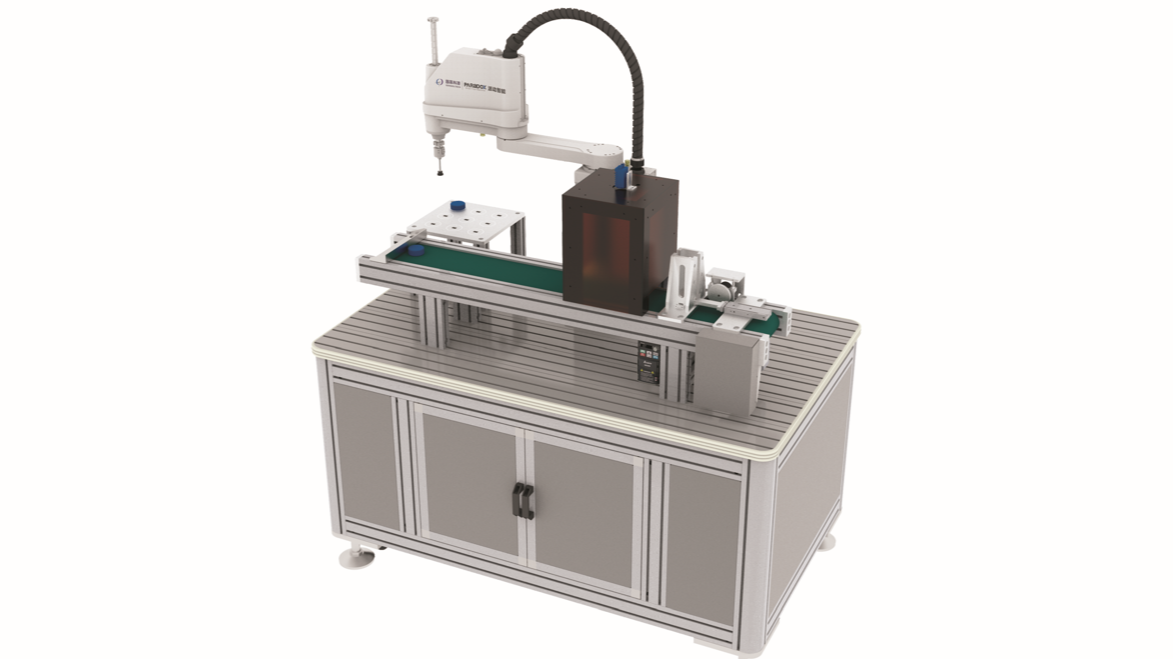
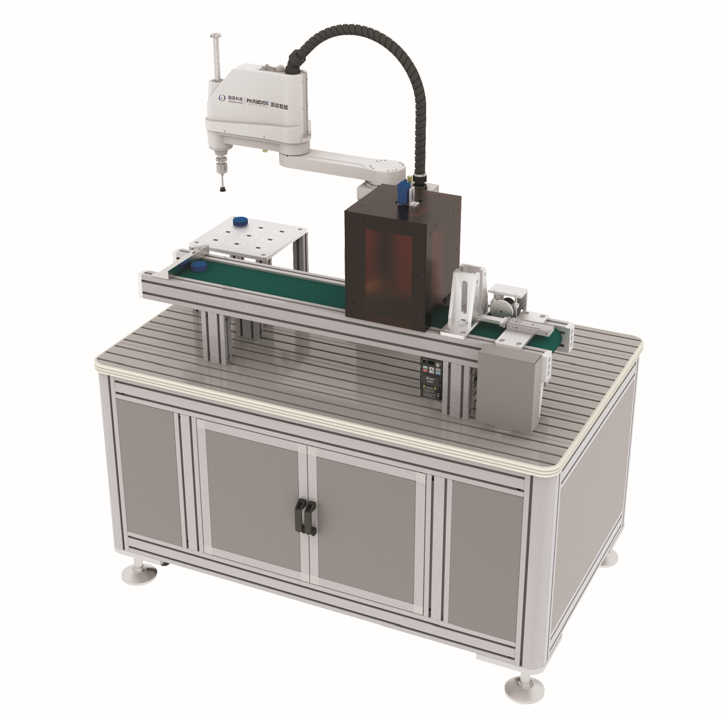
四自由度Scara机器人视觉跟踪系统
Scara机器人有3个旋转关节和1个移动关节。其旋转关节轴线相互平行,可以在平面内进行定位和定向;移动关节用于完成末端件在垂直于平面的运动。手腕参考点的位置是由两旋转关节的角位移φ1和φ2,及移动关节的位移z决定的,即p=f(φ1,φ2,z)。这类机器人的结构轻便、响应快,适用于平面定位,垂直方向进行装配的作业。
固高派动将SCARA机器人与机器视觉、快换抓手集成为一个工作站,学生除了可以完成基础的机器人操作,还可以掌握工业现场先进的自动化组件的控制。
实验内容:
基于运动控制卡的Scara机器人
1、机电一体化与机器人基础(C语言);
2、机器人运动学分析(轨迹规划算法、机器人正逆解)(C语言);
3、机器人图形示教实验(C语言);
4、机器人图形示教程序的设计和实现(C语言);
5、Scara机器人GRL语言编程;
6、机器人网络仿真与远程控制;
7、动力学控制实验(只提供Matlab版本接口说明及应用说明)。
基于工业机器人系统的Scara机器人
1、码垛标定;
2、DH模型设置;
3、轴关节参数设置;
4、通讯参数设置;
5、笛卡尔坐标系设置;
6、机器人零位标定;
7、位置点记录;
8、IO控制;
9、以太网通讯;
10、变量参数设置;
11、视觉跟踪工艺标定或视觉工艺标定;
12、机器人示教编程;
13、工业机器人系统二次开发(选配二次开发函数库)。
相关推荐