- 免费定制方案
- 免费提供咨询服务
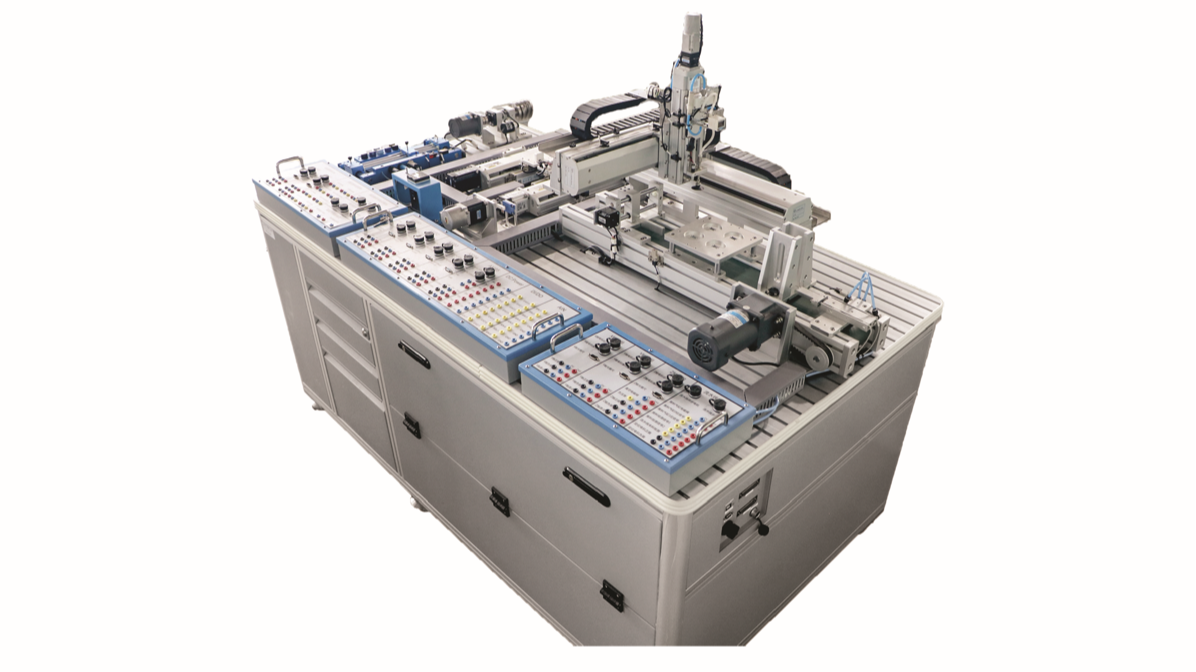
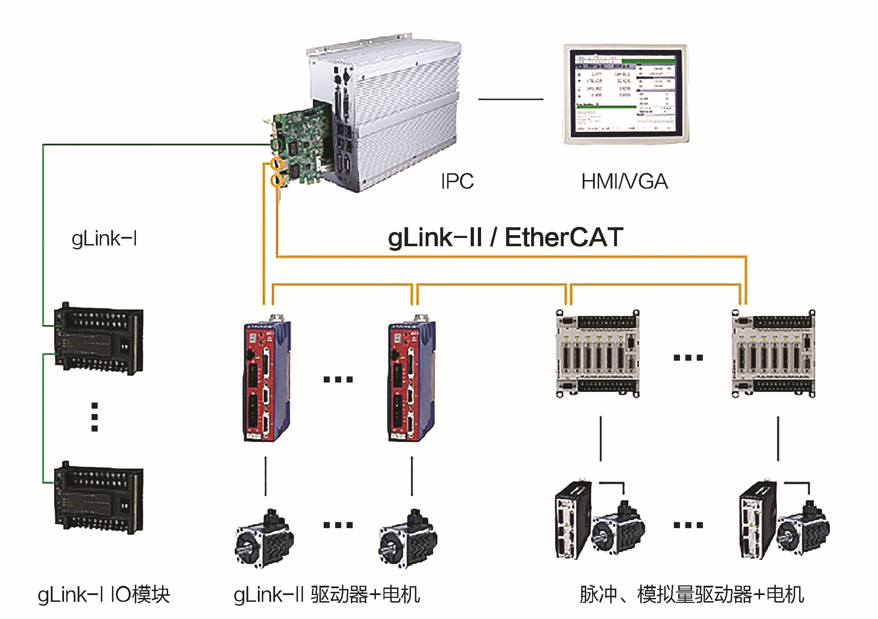
多轴网络型运动控制系统开发平台
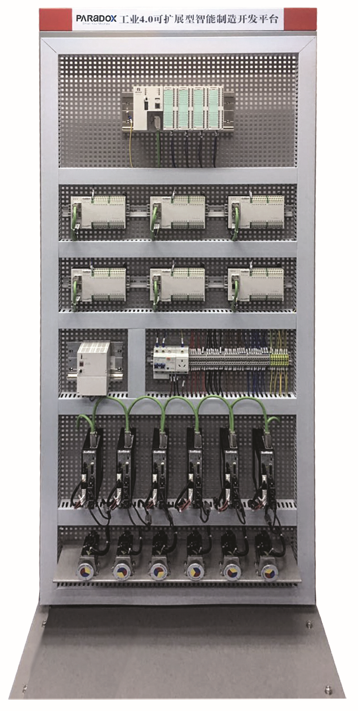
多轴网络型运动控制系统开发平台是一款基于总线协议的分布式实时系统,将具有通信能力的驱动器、执行器和测控仪表作为网络节点,连接成开放式、数字化、多节点通信的网络系统。平台基于固高自主知识产权的gLink-II总线或者EtherCAT总线的嵌入式运动控制器,集成了主站式解决方案,可控制多达64轴,同时支持gLink-I IO模块和EtherCAT IO模块扩展,为用户提供了多轴数、多IO点数的高性价比自动化解决方案。同时,运动控制器支持点位和连续轨迹,多轴同步,直线、圆弧、螺旋线、空间直线插补等运动模式,可以自由设定加减速、S型曲线平滑等参数。用户使用OtoStudio/C++开发环境,给计算机软件工程师和PLC软件工程师提供了友善的开发方式,用户可以轻松实现对控制器的编程,构建自动化控制系统。
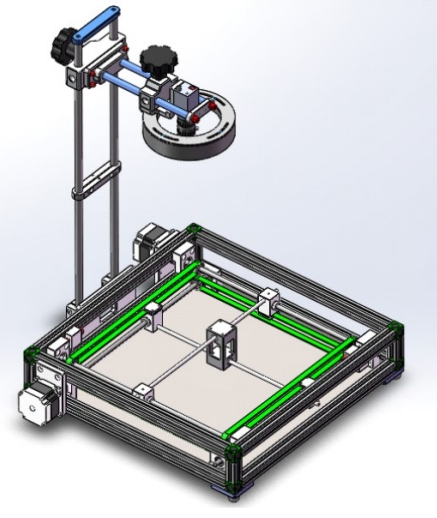
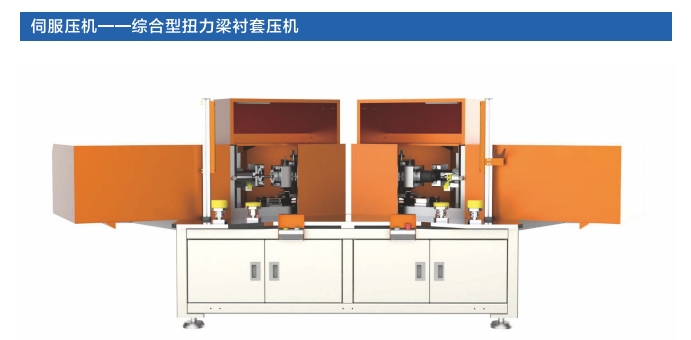
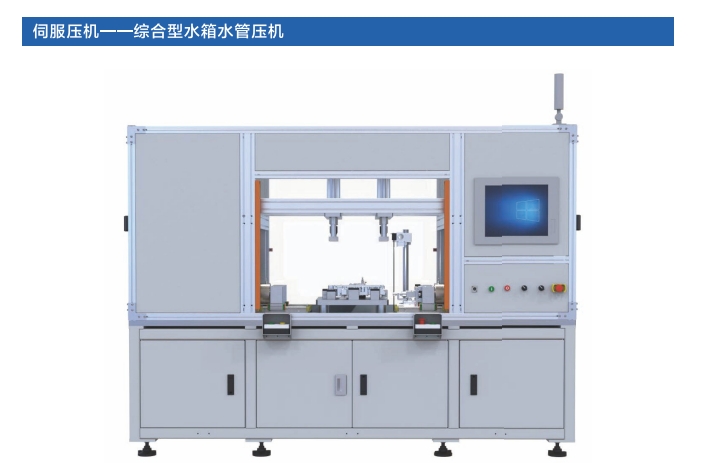
多轴网络型运动控制系统开发平台可用于机器人、数控机床、3C设备、锂电池设备、印刷设备、自动化流水线等。可充分满足学生的电机调试、编程控制以及算法验证的需求,并且可以模拟机器人、数控机床、点胶机等多种自动化设备进行轨迹规划并验证实际效果。

实验内容:
1、伺服驱动器电机调试及参数配置
2、EtherCAT/gLink-II总线通讯设置
3、运动控制轴控制参数配置
4、运动模式编程:点位运动、Jog模式、PT、电子齿轮及Follow模式
5、IO扩展模块添加及IO信号编程应用
6、常见警告或报警信号处理
7、可视化界面开发
IdeaBox -PLC智能总线控制器系统架构
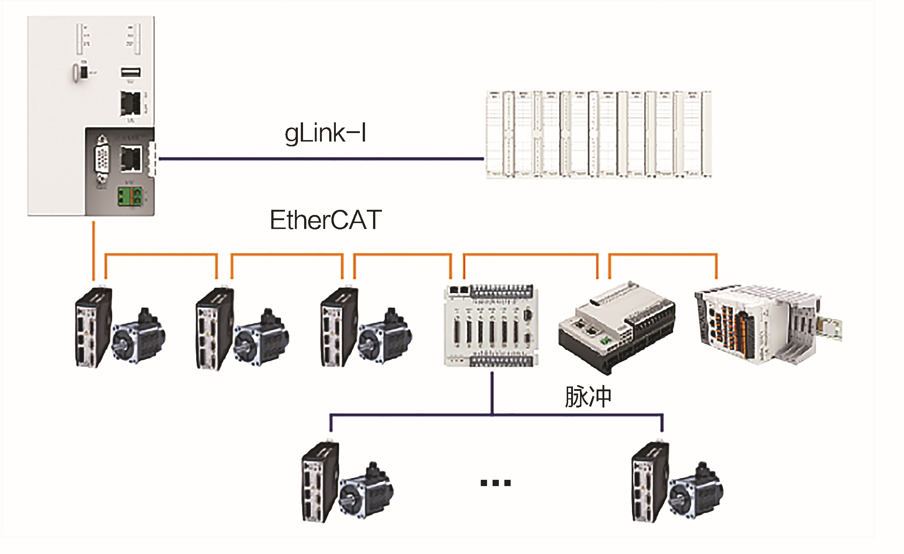
IdeaBox -PLC特点:
- iDEABOX PLC智能总线控制器采用多核实时多任务系统,具备高速的数据处理能力,运动控制和强大的逻辑管理功能,实时性能可达微秒级
- 符合国际标准规格的编程环境。符合开放编程的国际标准IEC61131-3支持指令表(IL)、功能块图(FBD)、梯形图(LD)、结构化文本(ST)、顺序功能图(SFC)、连续功能编辑器(CFC)六种编程语言
- 具备Super-EtherCAT专用控制接口,可实现32轴硬实时运动控制,其中8轴为高速同步轴,控制周期250us,支持点位、Jog、电子齿轮/凸轮、直线/圆弧插补、螺旋线插补、刀向跟随、速度前瞻等运动控制功能,其余24轴支将位置模式、速度模式、力矩模式等
- 强大的I/O扩展功能,通过EtherCAT总线可扩展到65535点I/O,通过gLink总线可以扩展多达2048点I/On 丰富的通讯接口,可支持EtherCAT、Modbus (RS232)、EtherNet、gLink、USB等通讯接口
- 强大的实时多任务,可支持16个任务并行执行,扫描周期可这lms
IdeaBox -PLC软件:
Otostudio软件,支持ST语言、梯形图开发
GSN/GEN总线控制卡系统架构:
GSN总线控制器特点:
- 采用PCI-e接口,支持多轴应用,最多48轴
- 支持固高自主开发的gLink-Ⅱ总线协议,通过总线协议和轴控模块组网,能提高系统的准确性和可靠性
- 支持I/O和轴模块的扩展,可采用不同类型轴控模块灵活组合
- 支持五轴RTCP算法、龙门控制等,具有多阶陷波滤波功能
- 内置多个行业应用工艺包算法,包括切割、焊接、点胶、微小线段速度前瞻处理、机器人拖动示教、飞剪跟随和印刷同步控制等
GEN总线控制器特点:
- 采用PCI-e接口,支持多轴应用(最多64轴同步控制)
- 支持标准EtherCAT协议,可兼容各类CoE从站
- 支持插补运动高阶S型加减速,具有多轴插补前瞻规划算法
- 支持空间圆弧插补、螺旋线插补、电子齿轮及电子凸轮
- 支持自定义速度规划
- 支持嵌入运动程序
- 支持I/O和轴模块的扩展,连接方式包括EtherCAT和gLink-I两种
GSN/GEN控制器软件:C++开发环境,支持Win7、Win10等系统。
产品选型:
名称 | 型号 | 描述 |
多轴网络型运动控制系统 开发平台 | GT-IB-ET32-A1 | IdeaBox -PLC,EtherCat总线协议,控制32轴交流伺服,PC机,包含1个EtherCat模块 Otostudio开发软件 |
GT-ET-ET32-A1 | GEN运动控制卡,EtherCat总线协议,控制32轴交流伺服,,PC机,包含1个EtherCat模块 C++开发环境 | |
GT-SN-LK32-A1 | GSN运动控制卡,gLink-II总线协议,控制32轴交流伺服,PC机,包含1个Glink-I模块 C++开发环境 |