- 免费定制方案
- 免费提供咨询服务
嵌入式便携设备
基于轻量化、在线学习、便携式等方面的考虑,固高派动研发了基于云平台虚拟环境的嵌入式便携设备,实现了数字双胞胎设计。其主要包括嵌入式直线电机一级倒立摆、嵌入式磁悬浮、嵌入式球杆系统和嵌入式直流伺服系统控制平台四种。
借助于嵌入式便携设备可以完成从虚拟机→云平台虚拟仿真→实体机的相互循环机制。学校学生可以通过虚拟开发机进行运动控制开发学习,同时,可以在云平台虚拟环境中看到与控制实物等效的控制效果。当掌握了运动控制开发后,可以通过远程控制实体机,查看实体,避免虚拟仿真与实体脱离。因此,通过嵌入式平台,可以为学校提供数字双胞胎的平台基础,便于学生在线学习掌握运动控制技术。
 平台界面
平台界面
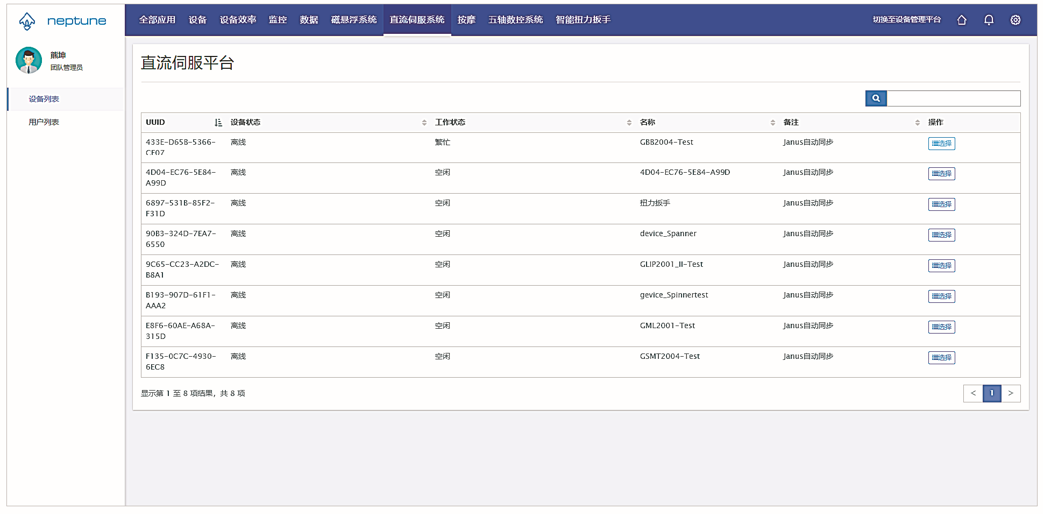 云平台——设备列表
云平台——设备列表
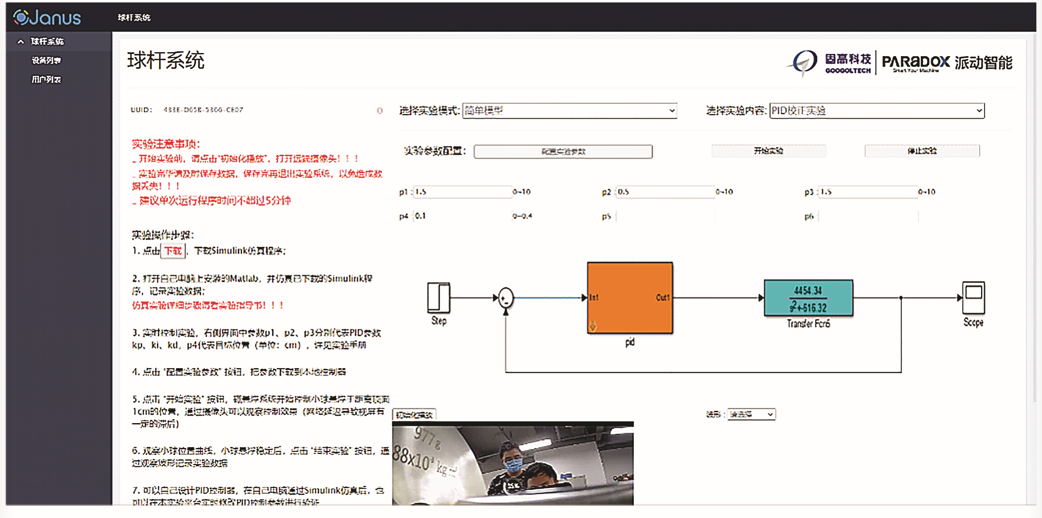
Janus——球杆系统虚拟仿真
嵌入式直线电机一级倒立摆
直线倒立摆是一款经典的自动控制理论实验装置,适合自动控制及相关专业的本科、研究生等学习经典控制理论和现代控制理论之用。直线一级倒立摆是单入双出系统,输入量为小车的加速度,输出量为摆杆角度和小车位移。通过设计控制器控制摆杆角度和小车位移,使学生理解和掌握自动控制理论的基本原理和应用方法;通过选择不同方法,确定不同参数,观察不同的实验效果,可以深入理解控制方法之间的差异以及参数对控制系统性能指标的影响。

实验内容:
1、 系统建模和稳定性分析
2、 全状态反馈控制
3、 LQR控制
4、 倒立摆自动起摆控制
5、 神经网络
嵌入式磁悬浮
利用磁力使物体处于无接触悬浮状态的设想是人类一个古老的梦想。但实现起来并不容易,磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化技术。随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进展,磁悬浮技术得到了长足的发展。近年来,磁悬浮技术在很多领域得到广泛的应用,如磁悬浮列车、主动控制磁悬浮轴承、磁悬挂天平、磁悬浮小型传输设备、磁悬浮测量仪器、磁悬浮机器人手腕、磁悬浮教学系统等。
磁悬浮实验装置为研究、应用磁悬浮技术提供一个实验平台。实验教程主要针对本科生、研究生学习应用经典控制理论、现代控制理论之用。磁悬浮系统本身的特点决定了他本身是一个不稳定系统,必须根据数据模型设计相应的控制器使系统稳定,因此更具创新性和挑战性。

实验内容:
1、 PID校正
2、 根轨迹校正
3、 频域法校正
4、 状态反馈控制
5、 系统建模和稳定性分析
嵌入式球杆
球杆系统是典型的单输入、双输出系统,通过控制电机转动从而使平衡杆产生倾斜角,小球开始沿平衡杆滚动。平衡杆上的线性电阻传感器与电机上的编码器分别检测出小球的实际位置和电机实际位置,反馈给控制器计算出控制量,从而控制电动机的转动位置,能够使小球定位在平衡杆上的任意位置
实验内容:
1、 球杆系统数学建模及稳定性分析
2、 球杆系统PID校正
3、 球杆系统根轨迹校正
4、 球杆系统频域法校正
5、 球杆系统状态反馈
6、 球杆系统LQR校正
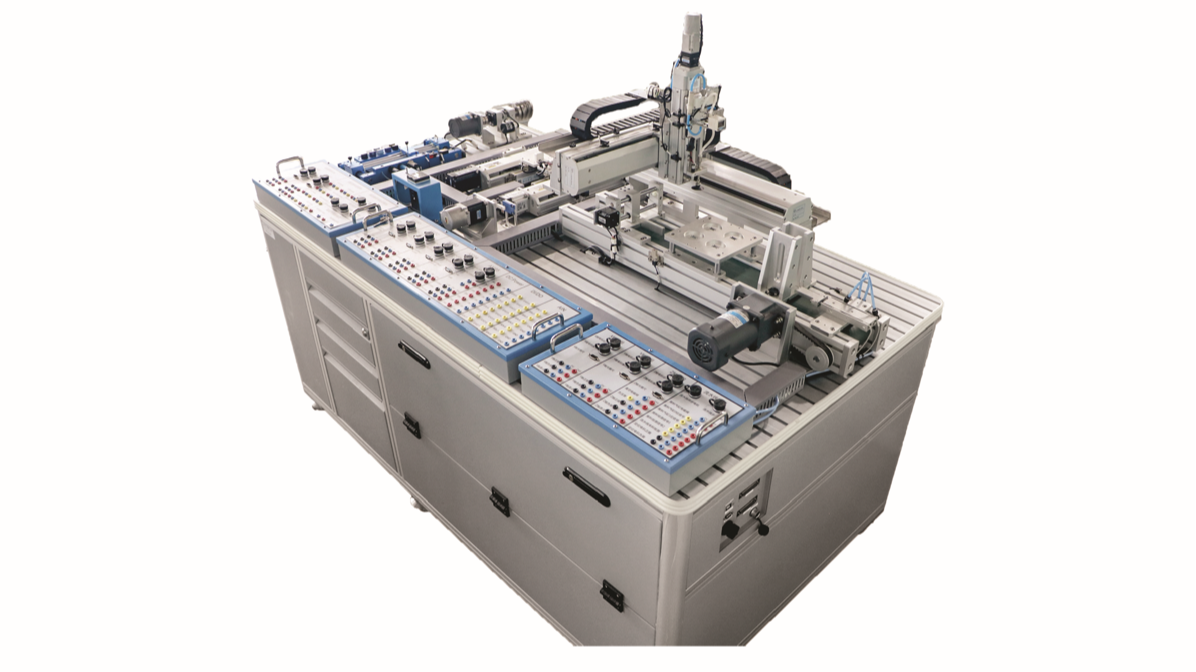
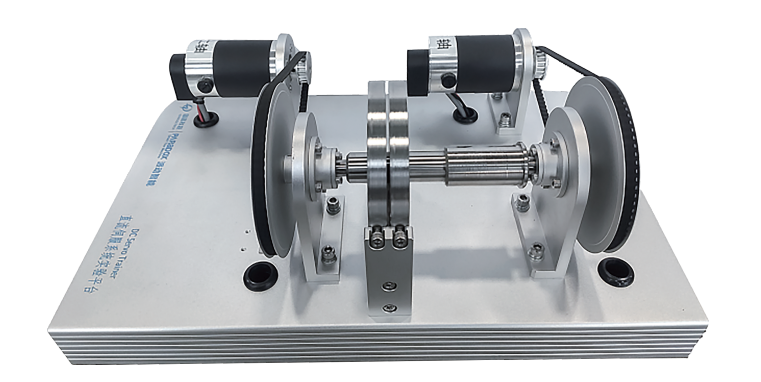
嵌入式直流伺服系统控制平台
在工业应用领域中,运动控制系统必须具备强抗扰动的能力来保证其运动状态的稳定。直流伺服系统控制平台GSMT2014为相关专业师生提供了该类应用的模拟平台。实现过程为A伺服模拟外部阻力来给B伺服提供扰动信号,B伺服在扰动下保持状态稳定,实现正常运行。
实验在系统转动惯量和负载转矩已知的前提下,首先通过专用软件调整直流伺服驱动器的三环,包括电流环、速度环和位置环的增益。然后在上位机搭建速度环、位置环模型,调整增益。最终,使系统在不同惯量负载状态下达到稳、准、快的期望性能指标。
实验内容:
1、系统建模及稳定性分析实验
2、PID校正实验
3、根轨迹校正实验
4、频域分析矫正实验
5、位置控制实验
6、二阶系统状态反馈
软件:
MATLAB/CCS、云平台Janus,支持Win7 32位/64位,WIN10 64位等操作系统
产品列表:
名称 | 型号 | 描述 |
嵌入式直线电机一级倒立摆 | GLIP3001-LM-03-E2 | 直线伺服驱动,圆筒型直线电机 |
嵌入式直线电机一级倒立摆 | GLIP3001-LM-02-E2 | 直线伺服驱动,U型直线电机 |
嵌入式直线一级倒立摆 | GLIP2001-E2 | 交流伺服驱动,旋转伺服电机 |
嵌入式磁悬浮 | GML2001-E2 | 激光位移传感器,电磁铁 |
嵌入式球杆系统 | GBB2004-E2 | 直流伺服电机 |
嵌入式直流伺服系统控制平台 | GSMT2014-E2 | 2套直流伺服电机 |
备注:嵌入式设备均带有云平台虚拟环境