- 免费定制方案
- 免费提供咨询服务
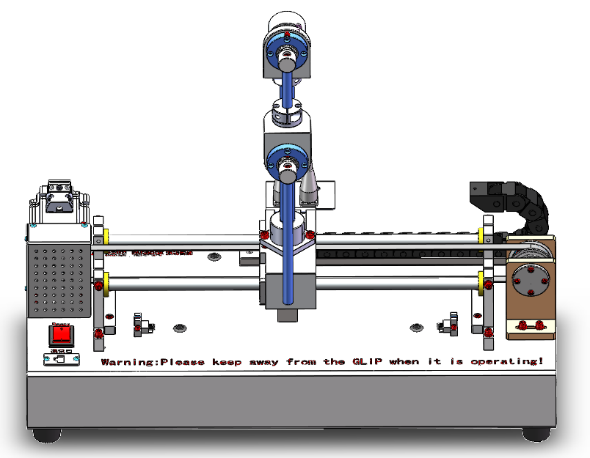
倒立摆是一种理想的控制对象平台,可以有效检验众多控制方法的有效性。对倒立摆系统的多变量、快速、非线性和自然不稳定等特性的研究,在理论和方法上都具有重要意义。因其级数增加而产生的控制难度是对控制算法的有力挑战,在实现其稳定控制的过程中,众多的控制理论和方法不断应用,新的控制理论和方法因而层出不穷,各种控制理论和方法都可以在倒立摆这个控制对象平台上加以实现和检验,并可以促成控制理论和方法相互间的有机结合,进而使得这些新方法、新理论可以应用到更广泛的被控对象中。
自动控制理论是自动化控制专业的核心专业基础课,也是机电类专业的必修专业基础课。自动控制理论实验是掌握控制系统分析和设计方法最有效的途径之一。自动控制理论实验主要目的是通过实验进一步理解自动控制理论的基本概念,熟悉和掌握控制系统的分析和设计方法,掌握常用工程软件的使用,如Matlab等。
- 实验内容
- 系统建模和稳定性分析
- 根轨迹校正
- PID法校正
- 频域法校正
- 根轨迹符合法校正
- PID法复合校正
- 频域法复合校正
- 复合校正的分析及改进
- 状态反馈控制
- 不同状态下状态反馈控制效果比较
- LQR控制
- 神经网络实验
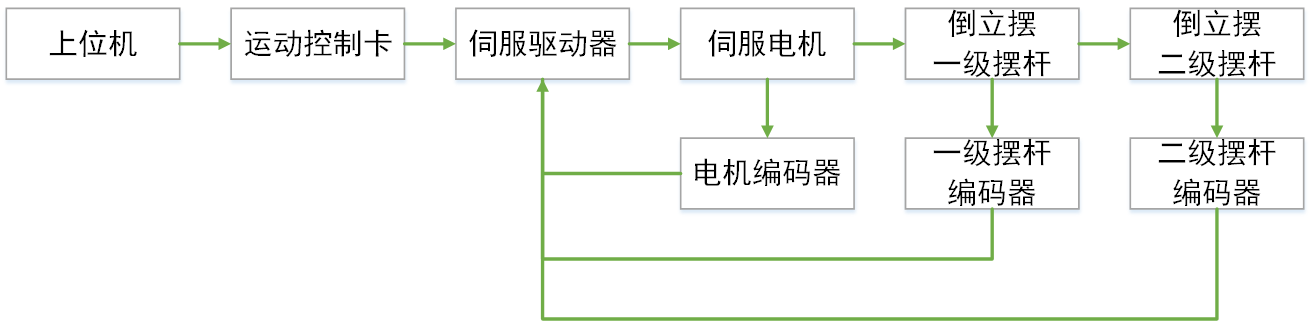
- 系统架构
配套教学资源
1、提供倒立摆设备的实验指导书及用户手册,提供控制卡MATLAB下的函数库介绍资料。
2、提供设备中与运动控制卡相匹配的运动控制系统开发与应用培训教学资源包:教学课件1套(课件数量160个)、软件操作视频1套(视频总时长680分钟)、训练测试样卷1套、在线测试题库(测试题数量300道)。
- 产品列表
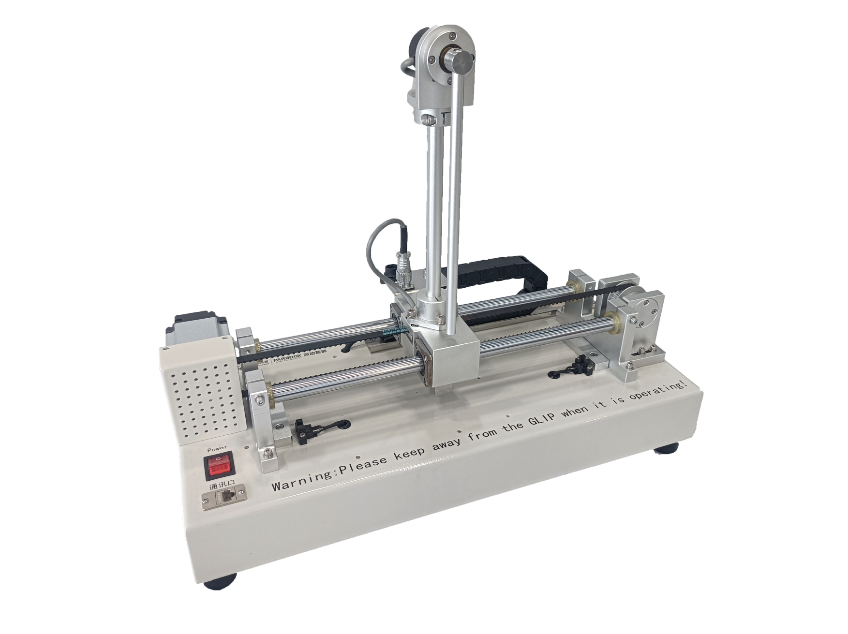
便携式直线倒立摆 | ||
产品名称 | 型号 | 描述 |
便携式直线一级倒立摆 | GLIP2301-Portable-Ⅰ | 便携式,GSN运动控制卡,交流伺服电机 |
便携式直线二级倒立摆 | GLIP2302-Portable-Ⅰ | |
相关推荐