- 免费定制方案
- 免费提供咨询服务
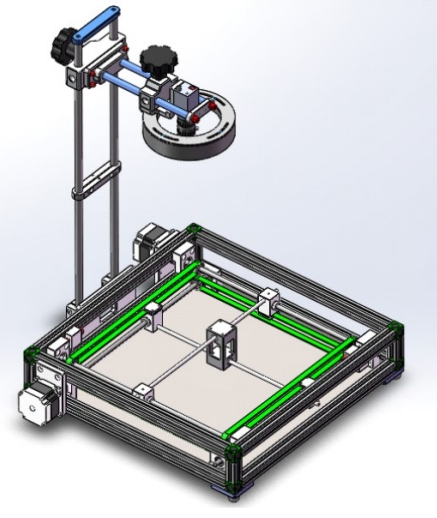
自平衡小车
自平衡小车是一个自由移动的三自由度倒立摆系统,可以实现本体前后移动、前后俯仰、左右转向偏航三种运动模式。小车上的倾角计和两个编码器能实时反馈电机的转角和俯仰偏角进入控制器,从而控制左右两轮的力矩使小车保持平衡,并可以通过无线遥控控制小车。

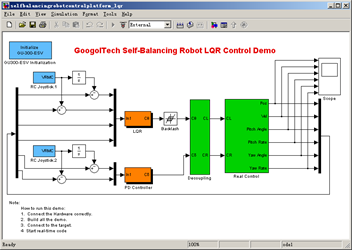
Matlab Simulink控制界面
控制方框图: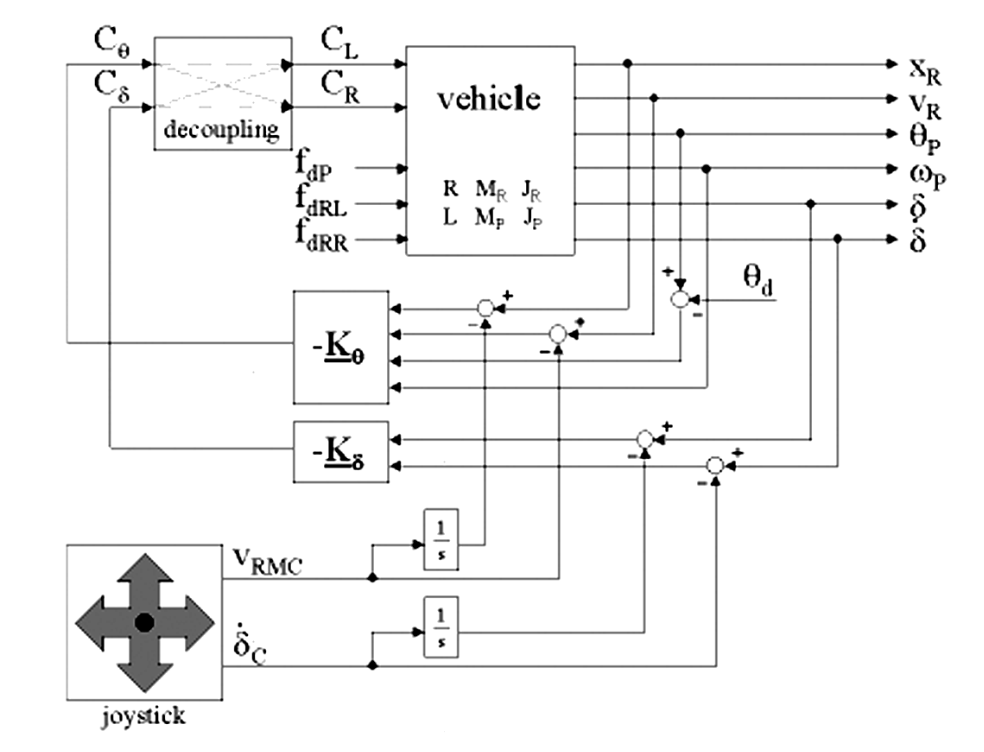
系统模型: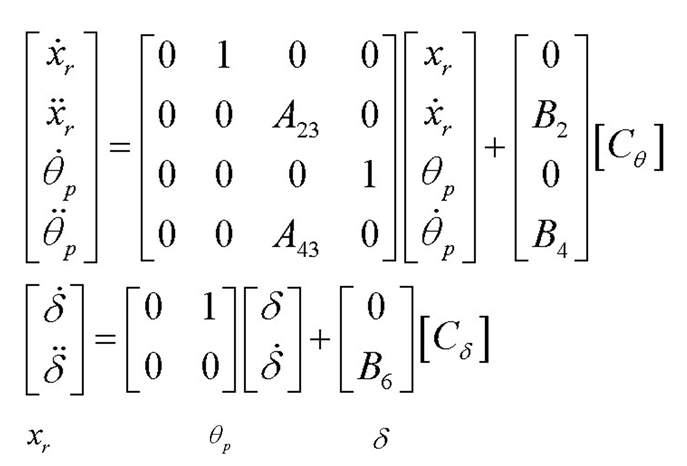
实验内容:
- 直线一级倒立摆及数学模型
- 线性二次型最优调节器
- 自平衡小车的数学模型建立
- LQR线性二次型最优调节器的设计
- 自平衡小车的LQR调节器Matlab仿真设计
- 自平衡小车的状态反馈Matlab仿真设计
软件:
Matlab、Otostudio
产品列表:
名称 | 型号 | 描述 |
自平衡小车 | GBOT2001 | WinCE系统 |
相关推荐