- 免费定制方案
- 免费提供咨询服务
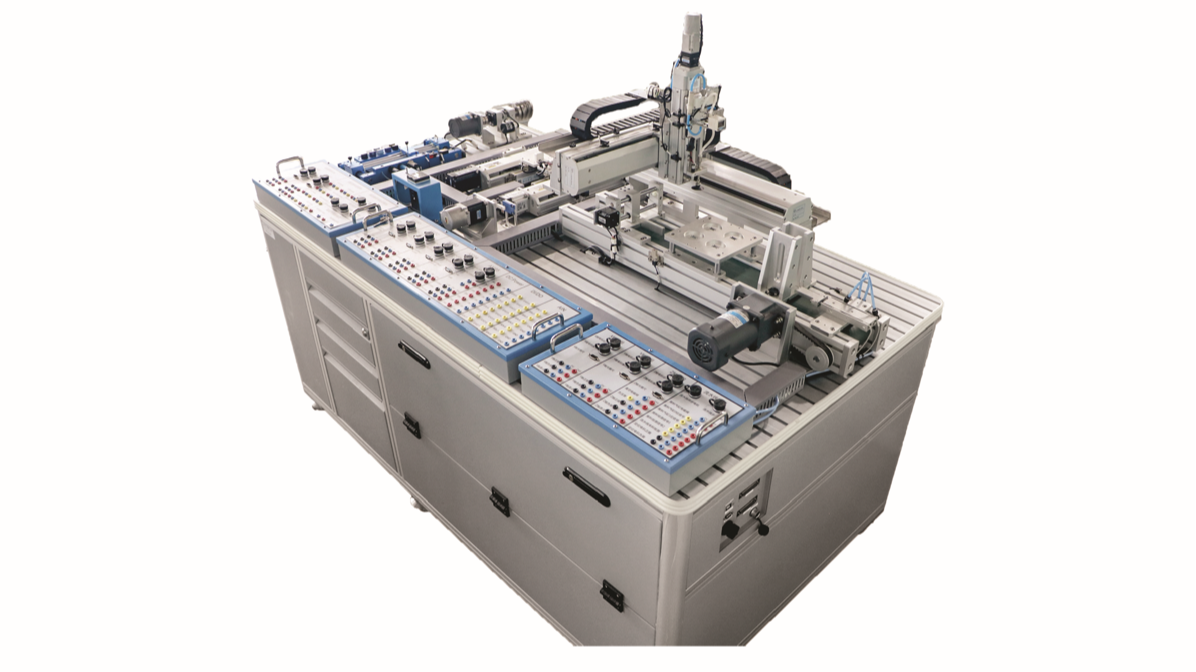
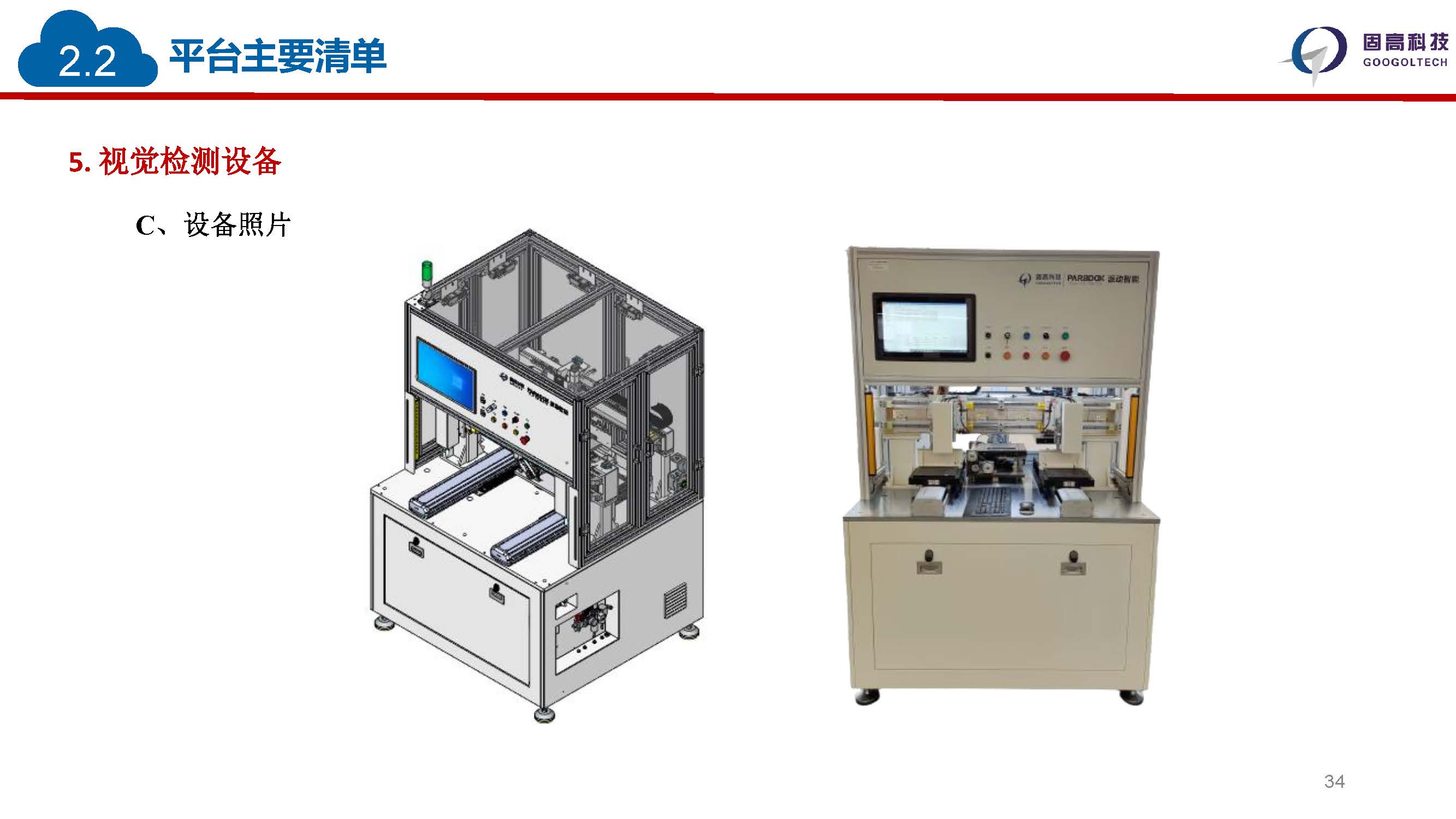
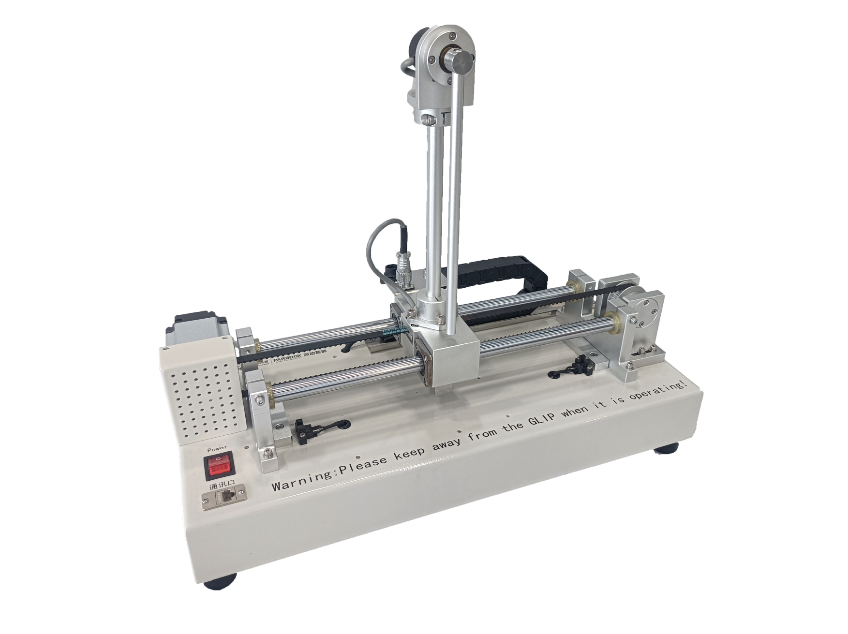
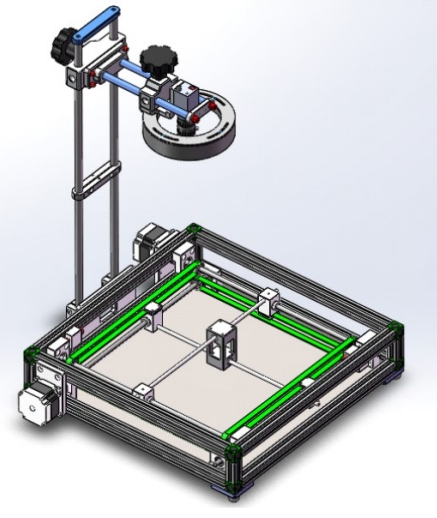
板球系统
视觉与伺服系统是装备智能化的必要基础技术,该平台是机器视觉与控制技术在工程领域结合的典型模型。
固高派动开发的板球系统是一个多变量、非线性控制系统,通过调整平板来控制小球的实际位置和运动轨迹。其以摄像头采集的图像信息和角度编码器采集的电机位置信号为反馈信息,得到小球的位置反馈,并以此为依据控制动态系统。平台可以进行经典控制理论、现代控制理论、运动控制、数字图像处理等课程实验和研究。
实验内容:
1、 板球系统的坐标系建模;
2、 板球系统的物理模型;
3、 板球系统的动力学分析;
4、 电气模型建模;
5、 控制结构及控制流程;
6、 摄像机标定及小球位置控制计算;
7、 摄像机标定实验;
8、 板球系统的PID控制实验。
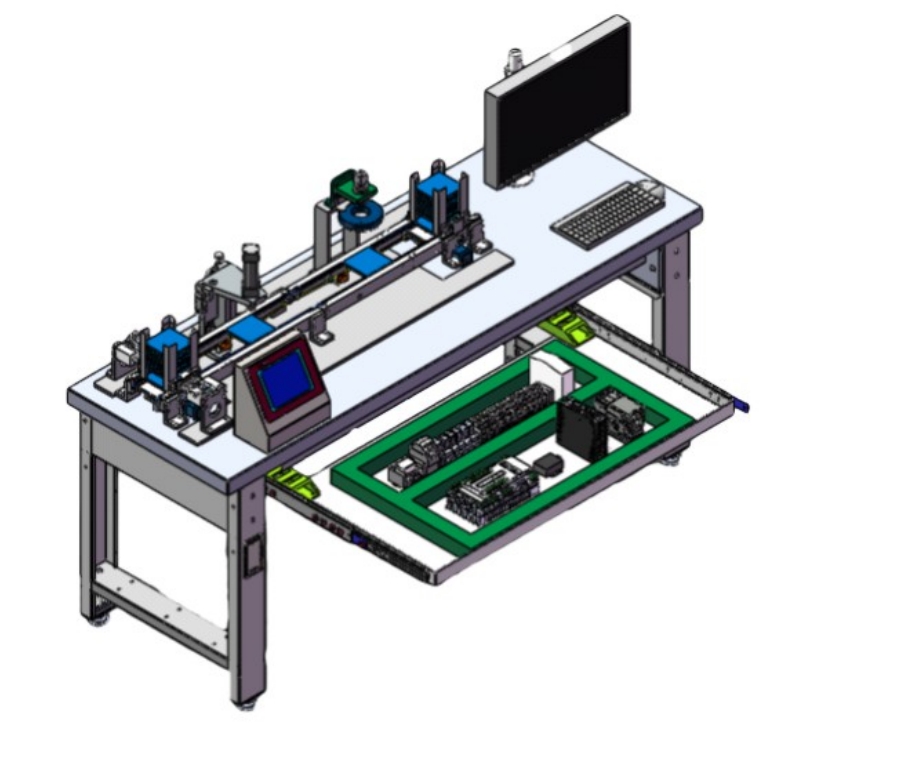
系统框图: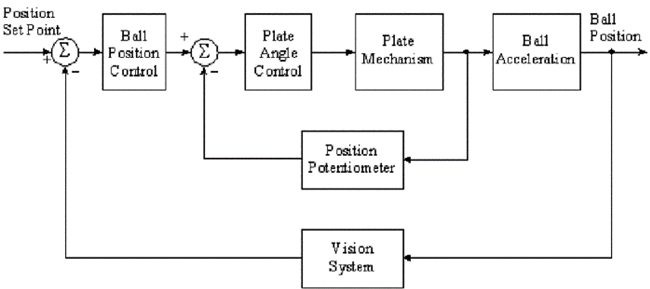
机器视觉定位:
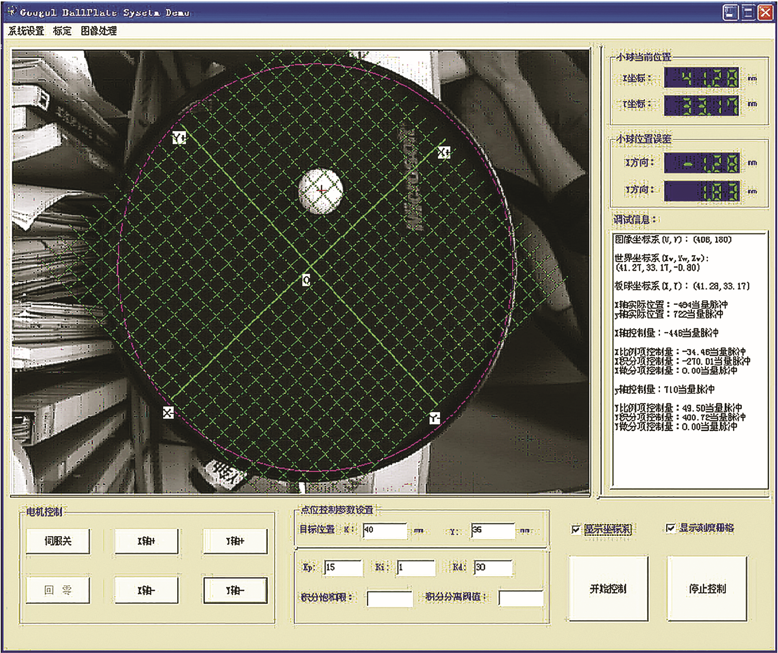
软件:
C++开发环境
产品列表:
名称 | 型号 | 描述 |
板球系统 | GPB2001-Ⅱ | 1、 由伺服系统,板球支架,视觉系统三部分组成; 2、 视觉系统可独立做图像算法实验; |
相关推荐