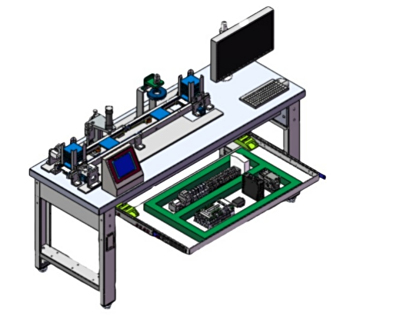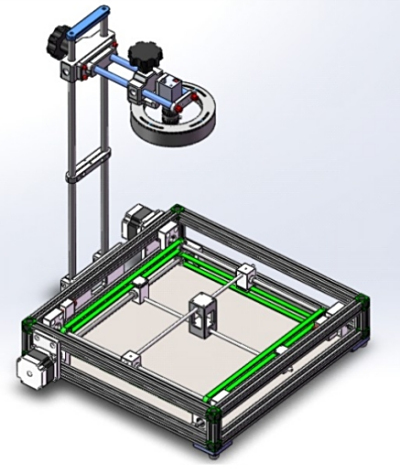

CPAC开发平台
CPAC开发平台集运动控制开发、逻辑控制开发、人机界面组态功能于一体,采用“PC+MC+PLC”的软件架构,满足各种工业控制场合的需求,支持IEC61131-3标准语言编程。用户可在该平台上进行多种类型工业装备的控制系统开发学习。

人工智能整体解决方案
人工智能是引领新一轮科技革命和产业变革的重要驱动力,其推动了人机协同、跨界融合、共创分享时代的发展。为培养大批具有创新能力和合作精神的人工智能高端人才,需要掌握人工智能的理论、技术和应用,以把握新的竞争力。