

四自由度冗余并联机器人
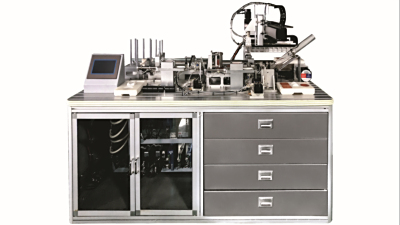
四自由度冗余并联机器人结构上具有低惯量、大负载能力、高速高精度等优点,故它在精密仪器、现代机床、高速自动 化生产线等领域有着广阔的应用前景。GPM四自由度冗余并联机器人由同一个平面内的三个二开杆链机构连接而成,末端执 行器安装在开链机构相同的地方,整个机构由三个分别安装在基座处的绝对值交流伺服电机驱动,采用GTS-400-PV运动控 制卡实现电机控制和信号采集。该机构是在传统的五杆机构附加了一条支链,该冗余支链可以消除五杆机构的奇异性,改善力 传递性能,并且得到唯一的前向运动学解。
机械传动与驱动技术应用开发平台
智能制造涉及专业众多,知识点分散,针对这种特点,固高派动提出了以项目为导向的实验平台。在教学内容开始之前,先将实验对象告知学生,并进行任务分解,让学生了解理论课程如何在工程实践中体现,以达到更好的激发学生学习兴趣的目的。


单轴直线运动控制平台
精密机械的直线位移精度和重复定位精度是重要性能指标,机械设备运动加工过程中的动态特性是影响加工效果的重要因素。动态精密直线位移测量系统能够推动国内精密机械、机床进行高速化及高精度化的发展。

两维数控平台
通用线性模块和XY工作台是多种数控加工、电子加工设备的基本部件,也是各种科学研究、应用开发及教学实验的通用平台。固高科技面向制造行业和高等院校开发的GXY系列通用线性模块和XY工作台,采用模块化设计思想和工业化制造标准设计制造

