- 免费定制方案
- 免费提供咨询服务
机器人系统开发
固高科技的工业机器人控制系统开发平台由开放、可重组的硬件平台和软件平台组成。开发平台基于WINCE/WINDOW7的操作系统,满足机器人应用对实时性、安全性及稳定性的需求。
- 目标群体:该平台针对有开发能力的机器人制造商、有行业应用需求的工业客户和高校研究型机构,采用可二次开发的系统架构,为客户定制工艺、算法提供解决方案。
- 目标行业:机器人控制系统开发平台提供弧焊、点焊、切割、喷涂、搬运、装配、加工、码垛、跟随取放、数控雕刻等工艺,广泛应用于汽车、食品、包装、激光、3C等行业。
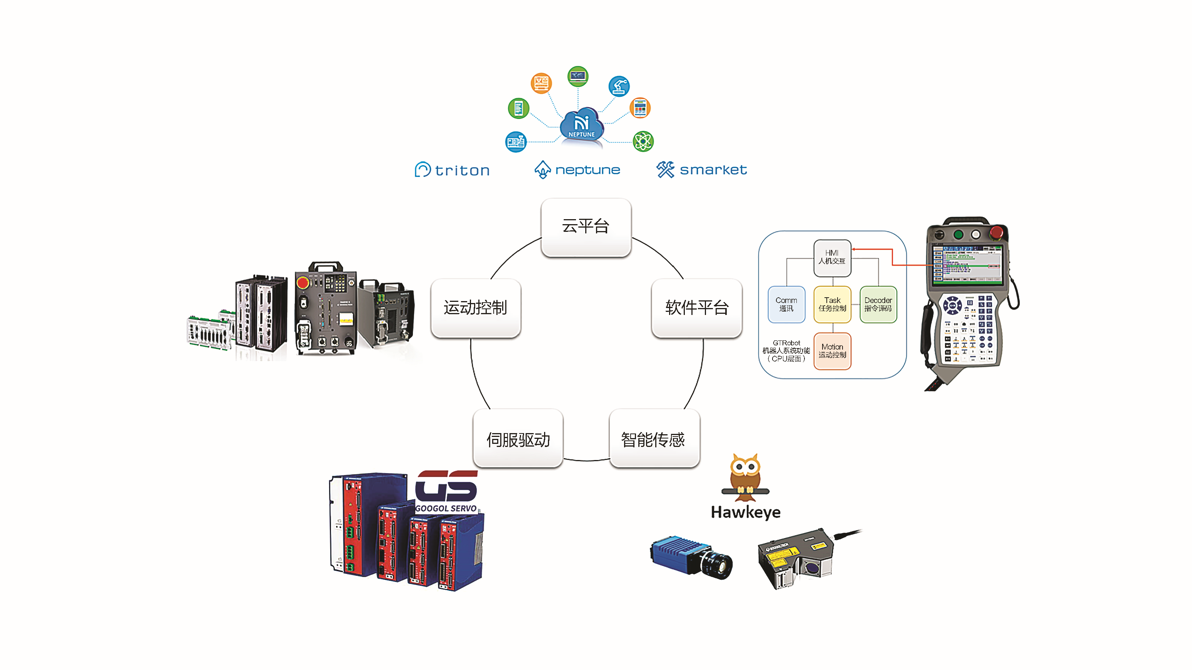
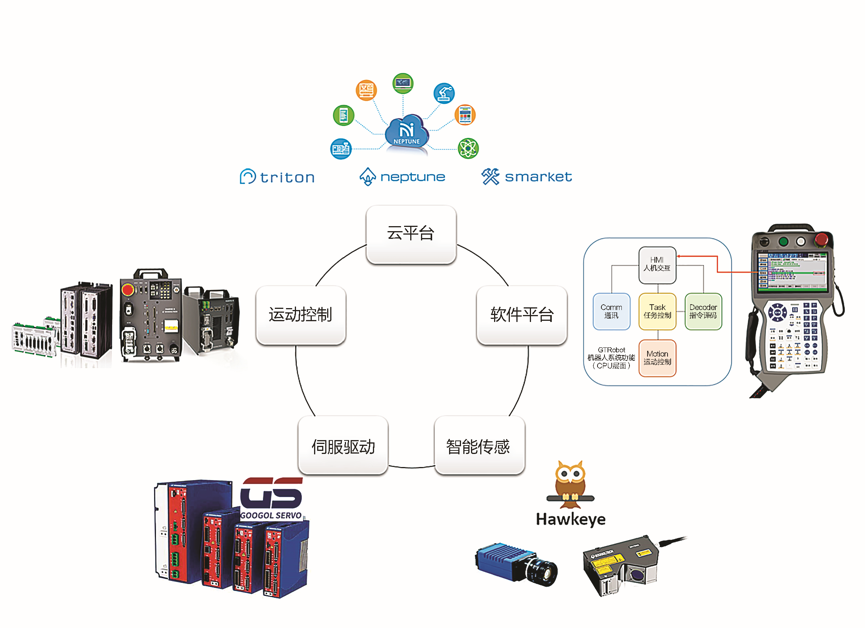
- 系统组成:固高科技提供了完整的机器人系统解决方案,为用户提供伺服驱动、运动控制、智能传感、软件平台、云平台等多种工业级产品模块。
工业机器人控制系统组成
硬件系统架构:
机器人系统的硬件平台主要为拿云(Marvie)系列。其中,拿云四装载R688S运动控制卡,可直接控制4个伺服电机,最多控制16个伺服电机;拿云六装载R688运动控制卡,可直接控制6个伺服电机,最多控制16个伺服电机。
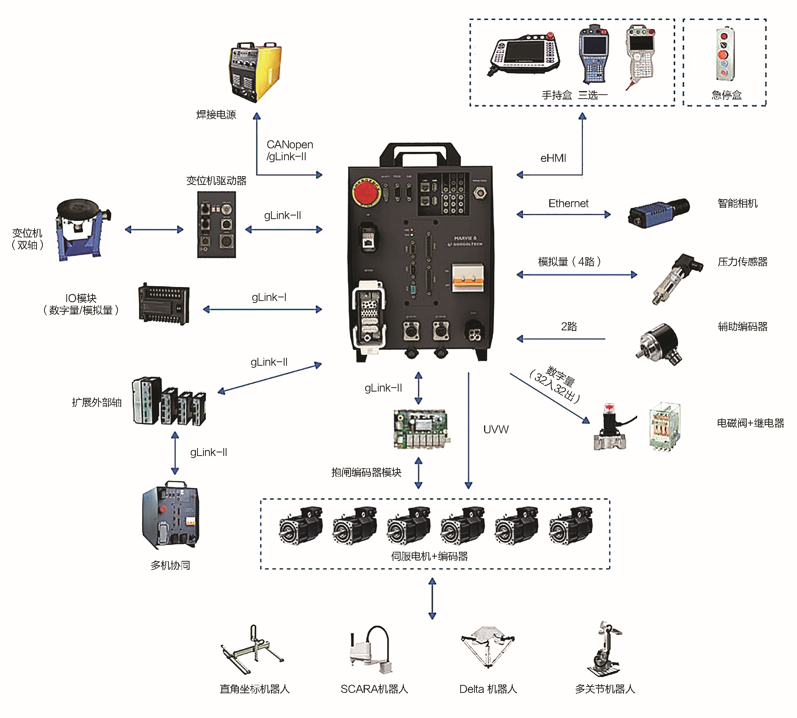
拿云六系统架构图:开放式可重组工业机器人控制系统
软件系统架构:
开放式可重组工业机器人控制系统开发平台(简称机器人系统或GTRobot)由平台应用层、运动控制层、驱动层组成。平台应用层基于CPU和windows操作系统,以C++、Qt、Sqlite为主要开发工具,用于实现人机交互、共享内存、指令译码、任务管理、通讯、工艺等机器人系统基本模块。运动控制层主要基于DSP/ARM芯片,用于完成轨迹规划、运动学、动力学等计算密集型、实时性要求高的运算。
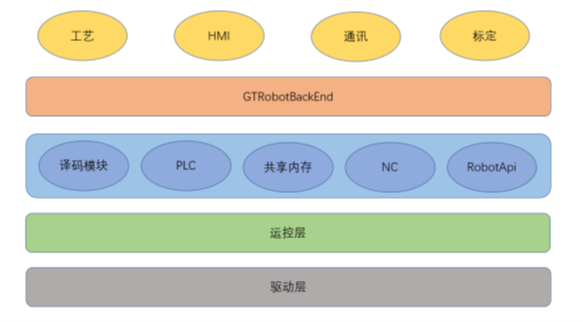
软件架构图:开放式可重组工业机器人控制系统
开发方法: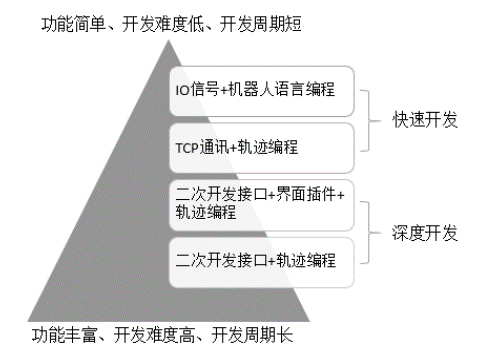
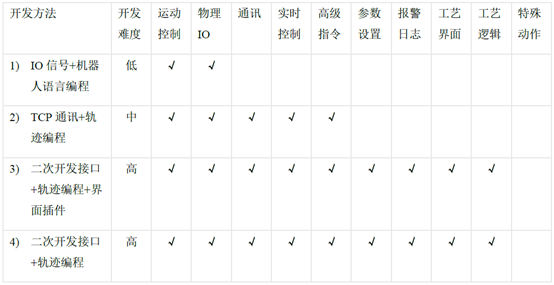
机器人系统开发方式
各个开发方法重点支持的功能模块如下表所示:
开发环境特点:
- 开放式、可重组机器人应用系统二次开发平台,提供多构型机器人运动学模型函数和轨迹插补接口;
- 符合IEC61131-3标准,支持C/C++语言编程;
- 精确到1ms的实时内核;
- 支持第三方UI界面开发工具;
- 支持网络访问与维护;
- 多重加密功能,保护客户知识产权;
- 方便实现智能制造与生产管理。
相关推荐