- 免费定制方案
- 免费提供咨询服务
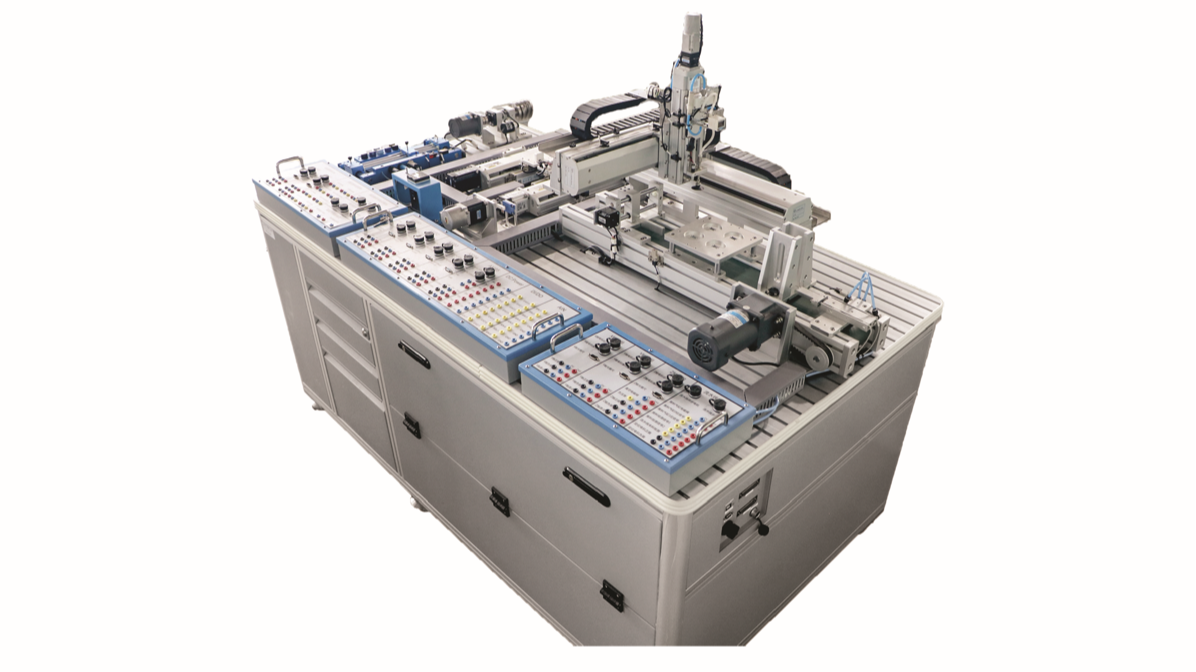
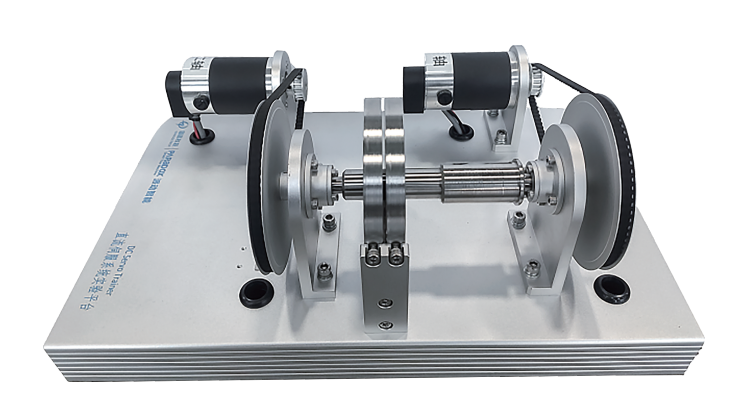
直流伺服系统控制平台
一般应用于工业生产线上的运动控制系统,在达到目标速度或位置后,需要系统具有较强的抗干扰能力,以保持其运动状态。直流伺服系统控制平台在考虑系统转动惯量和负载扭矩的前提下,通过专用软件调整驱动器的电流环、速度环和位置环的参数;调整运动控制器的速度环、位置环参数,从而使系统达到稳、准、快、强的期望性能指标要求。
直流伺服系统控制平台是基于高性能运动控制器GTS400和智能伺服驱动器的双电机直流伺服控制系统。其可以在MATLAB/Simulink下完成实时控制实验,内容包括:系统建模和稳定性分析、时域分析、频率特性分析、PID校正、根轨迹校正、频域法校正,共六个实验。
利用本实验平台,用户可以理解PID影响系统性能指标的基本原理,掌握调整直流伺服驱动器PID电流环、速度环、位置环参数的方法;深入理解运动控制中不同转动惯量对电机速度环、位置环性能的影响情况;理解不同阻尼力矩和扰动力矩扭矩对电机位置环、速度环性能的影响情况,从而培养运动控制的实践技能。
实验内容:
1、直流伺服驱动器电流环、速度环的参数整定;
2、Matlab/Simulink建模环境认知与搭建;
3、系统建模及稳定性分析实验;
4、系统时域特性分析实验;
5、系统频域特性测试与分析实验;
6、PID校正实验;
7、根轨迹校正实验;
8、带惯量盘系统建模及控制器设计;
9、位置控制实验。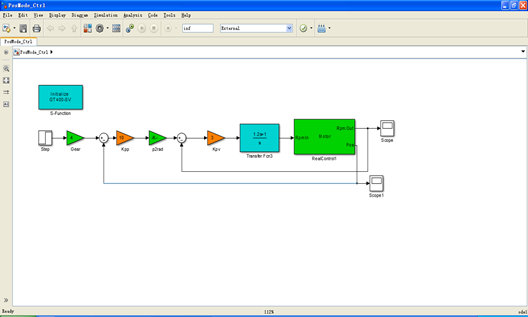
Matlab/Simulink控制界面
软件:
MATLAB,支持Win7 32位/64位,WIN10 64位等操作系统
产品列表:
名称 | 型号 | 描述 |
直流伺服系统控制平台 | GSMT2014-Ⅱ | 运动控制卡+直流伺服电机 |
相关推荐