- 免费定制方案
- 免费提供咨询服务
倒立摆
倒立摆是一种理想的控制对象平台,它结构简单、成本较低,可以有效检验众多控制方法的有效性。对倒立摆系统的多变量、快速、非线性和自然不稳定等特性的研究,在理论上和方法上都具有重要意义。这不仅因为其级数增加而产生的控制难度是人类对其控制能力的有力挑战,更是因为在实现其稳定控制的过程中,众多的控制理论和方法不断应用,新的控制理论和方法因而层出不穷,各种控制理论和方法都可以在倒立摆这个控制对象平台上加以实现和检验,并可以促成控制理论和方法相互间的有机结合,进而使得这些新方法、新理论可以应用到更广泛的被控对象中。
自动控制理论是自动化控制专业的核心专业基础课,也是机电类专业的必修专业基础课。自动控制理论实验是掌握控制系统分析和设计方法最有效的途径之一。自动控制理论实验主要目的是通过实验进一步理解自动控制理论的基本概念,熟悉和掌握控制系统的分析和设计方法,掌握常用工程软件的使用,如Matlab等。

实验内容:
1、系统建模和稳定性分析;
2、根轨迹校正;
3、PID法校正;
4、频域法校正;
5、根轨迹复合法校正;
6、PID法复合校正;
7、频域法复合校正;
8、状态反馈控制;
9、不同状态下状态反馈控制效果比较;
10、LQR控制;
11、倒立摆自动起摆控制。
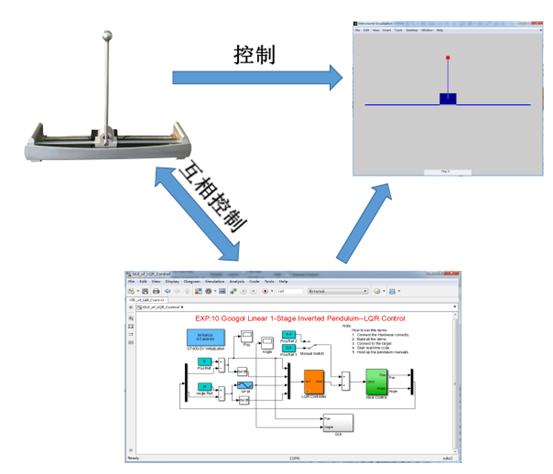 仿真互动示意图
仿真互动示意图
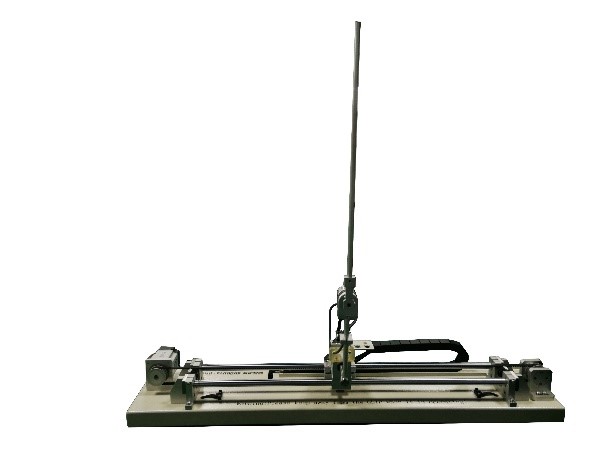
一、同步带直线倒立摆:

同步带直线一级倒立摆
 同步带直线二级倒立摆
同步带直线二级倒立摆
同步带直线倒立摆可开设实验:
- 运动控制基础实验
- 直线一级顺摆的PID控制仿真与实验
- PID控制
- 直线一级顺的LOR控制仿真与实验
- 频率响应控制
- 直线一级倒立摆自动起摆控制实验
- 状态空间极点配置实验
- 线性二次最优控制LQR控制实验
- 直线一级顺摆的建模与分析
- 直线一级顺阶跃响应分析
- 直线一级的频率响应分析
- 直线一级顺摆的根轨迹分析
- 直线二级倒立摆Matlab仿真(二级倒立摆)
- LQR控制器设计及仿真(二级倒立摆)
- 直线二级倒立摆LQR控制实验(二级倒立摆)
- 系统可控性分析(二级倒立摆)
- 系统物理模型(二级倒立摆)
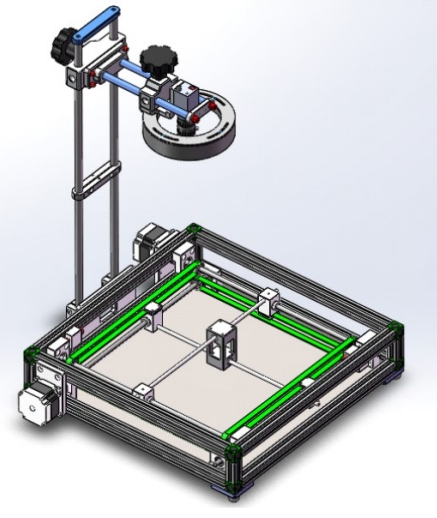
二、XY平面倒立摆:

XY平面倒立摆
XY平面倒立摆可开设实验:
- 系统组成认知
- LQR实时控制实验
- 系统硬件与电气安装
- 平面两级倒立摆的建模与分析
- 平面倒立摆建模、仿真
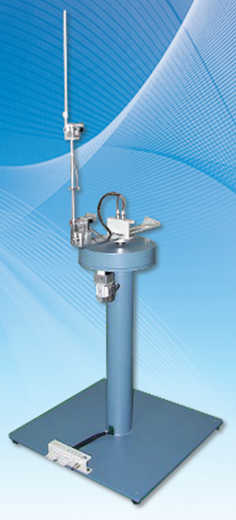
三、环形倒立摆:
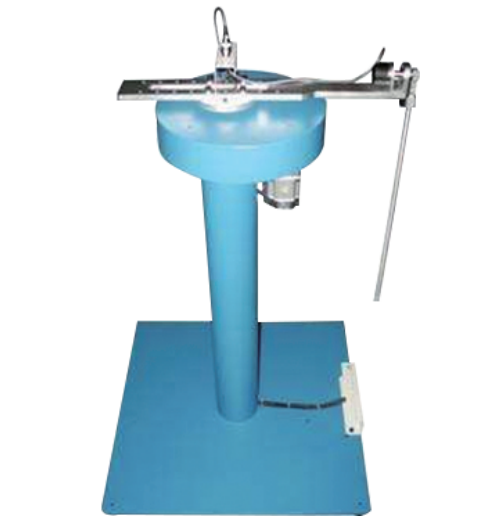
环形倒立摆
环形二级倒立摆
环形倒立摆可开设实验:
- 系统安装与软件认知
- 状态空间法控制算法设计环形倒立摆的数学建模
- 根轨迹控制算法设计PID控制算法设计
- 频率响应控制算法设计
软件:
MATLAB,支持Win732位/64位,WIN1064位等操作系统
产品列表:
名称 | 型号 | 描述 |
直线电机摆 | ||
直线电机一级倒立摆(圆筒型) | GLIP3001-LM-03-Ⅱ | 圆筒型直线电机 |
直线电机一级倒立摆 | GLIP3001-LM-02-Ⅱ | U型直线电机 |
直线电机一级倒立摆&二阶系统实验平台 | GLIP3001-LM-02S-Ⅱ | U型直线电机+弹簧阻尼 |
直线电机二级倒立摆 | GLIP3002-LM-02-Ⅱ | U型直线电机 |
直线电机二级倒立摆&二阶系统实验平台 | GLIP3002-LM-02S-Ⅱ | U型直线电机+弹簧阻尼 |
直线摆 | ||
直线一级倒立摆 | GLIP2001-Ⅱ | 交流伺服同步带传动 |
直线二级倒立摆 | GLIP2002-Ⅱ | |
直线三级倒立摆 | GLIP2003-Ⅱ | |
直线四级倒立摆 | GLIP2004-Ⅱ | |
柔性摆 | ||
直线柔性一级倒立摆 | GLIP2011-Ⅱ | 交流伺服同步带传动,增加了弹簧阻尼器 |
直线柔性二级倒立摆 | GLIP2012-Ⅱ | |
直线柔性三级倒立摆 | GLIP2013-Ⅱ | |
平面摆 | ||
平面一级倒立摆 | GPIP2001-Ⅱ | XY交流伺服运动平台 |
平面二级倒立摆 | GPIP2002-Ⅱ | |
平面三级倒立摆 | GPIP2003-Ⅱ | |
环形摆 | ||
环形一级倒立摆 | GRIP2001-Ⅱ | 交流伺服+减速机传动,单边摆杆 |
环形串联二级倒立摆 | GRIP2002-Ⅱ | 交流伺服+减速机传动,单边二级摆杆 |
环形并联二级倒立摆 | GRIP2011-II | 交流伺服+减速机传动,两边各一级摆杆 |
环形串并联三级倒立摆 | GRIP2012-II | 交流伺服+减速机传动,一边一级摆杆,一边二级摆杆 |
环形双摆杂技机器人 | GRIP3002-II | 交流伺服+减速机传动,与串联二级相同,摆杆长度不同 |
注:三级倒立摆和四级倒立摆均不提供软件